Our main research focuses on highly dynamic and efficient robotics. Our goal is to create technology to enable safe physical Human-Robot Interaction for healthcare, mobility, space, defense or entertainment applications.
Robot
embodiment
We research robotic actuators with high dynamic efficiency and wide control bandwidth to enable the development of agile and efficient robots. Our work includes modeling, prototyping, and designing algorithms for electric machines that deliver high torque with greater efficiency and excellent dynamic and thermal performance. We design and manufacture high-efficiency actuators, integrating our proprietary technology in electric machines, mechanical transmissions, sensors, electronics, and control systems.
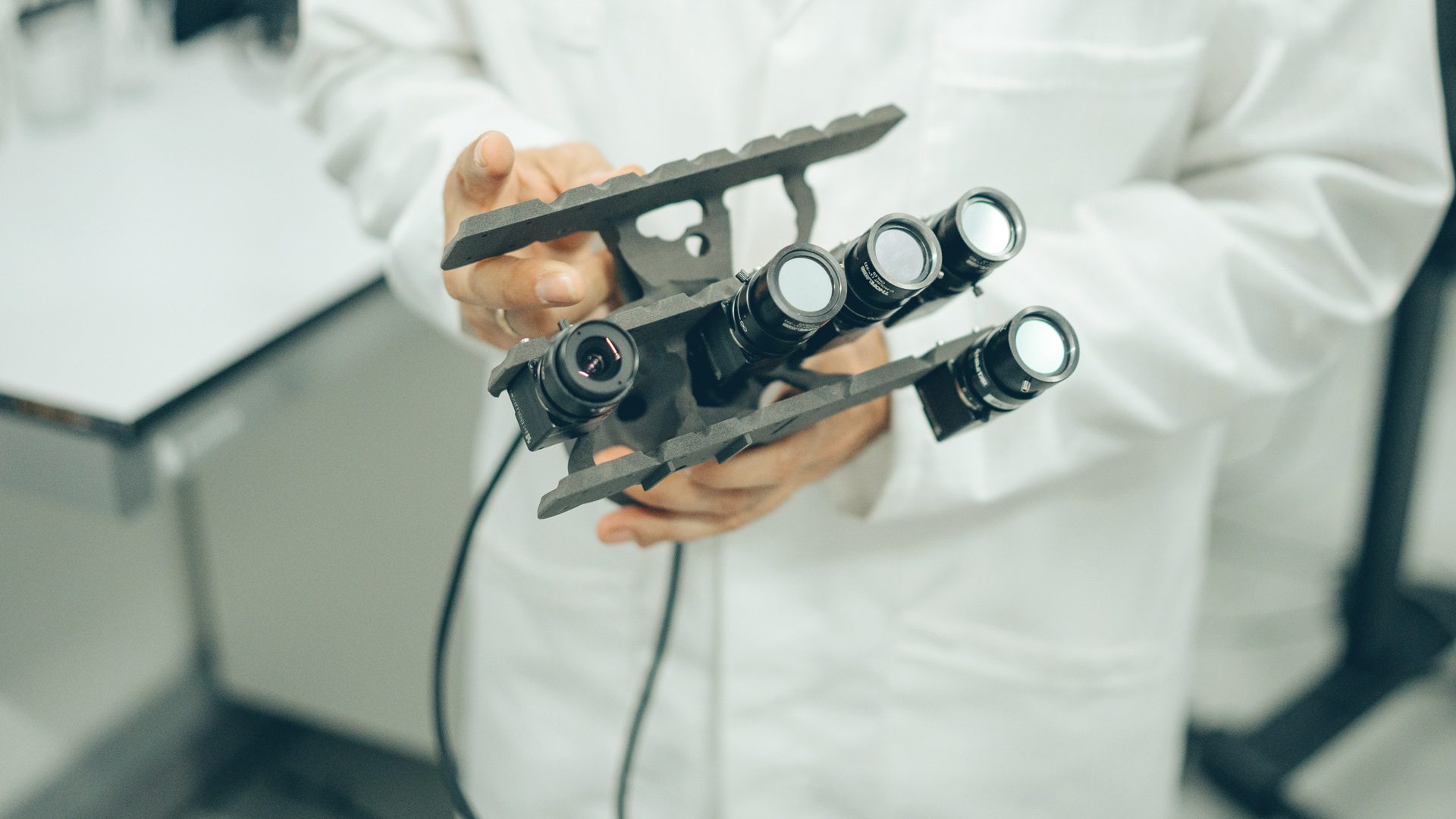
Robotic
perception
We aim to achieve a real-world comparison between classical and neuromorphic machine vision systems. Through multiple performance metrics, we seek to determine which combination of classical technologies—at different levels (sensor, computation, neural networks)—delivers the best performance in an on-board demonstrator.
Space
propulsion
Our goal is to significantly extend the lifespan of satellites and space probes for long-term orbital and interplanetary missions. To achieve this, we conduct theoretical research, numerical simulations, and validation tests both on the ground and in orbit. Our aim is to assess the feasibility of a novel electric micro-propulsion system for aerospace applications, offering performance and durability beyond the current state of the art.